|
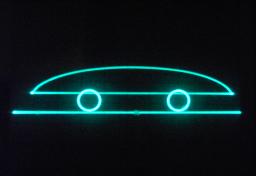
Vor einigen Wochen wurde ich der stolze Besitzer eines wundervollen Analogrechners des Typs EAI 580, den ich vom Institut für Meß- und Regeltechnik der Universität Karlsruhe erhielt (an dieser Stelle möchte ich Herrn Böhringer für seine Hilfe und Unterstützung danken). Nach einer gründlichen Reinigung des Systems sowie der Behebung einiger kleiner Fehler (augenblicklich sind nur noch vier der 64 Operationsverstärker sowie zwei Doppelintegrierer nicht funktionsfähig) suchte ich nach einem schönen Programmierproblem, um mich mit dem System vertraut zu machen. Da sowohl die Integratoren über elektronische Schalter verfügen als auch das Gesamtsystem einige freie elektronische besitzt, lag der Gedanke nahe, diese als Multiplexer zu schalten, um gleichzeitig ein wenig Erfahrung mit dem Digitalteil des Rechners zu sammeln. Aus diesem Grunde entschloss ich mich, das Beispiel der Automobilfederung erneut zu implementieren, das zuvor auf einer Telefunken RA 741 umgesetzt wurde, aber als Ausgabegerät auf meinen Vierkanal-X/Y-Oszilloskopmultiplexer angewiesen war. Das untenstehende Bild zeigt ein Bildschirmphoto der laufenden Simulation. Das Modell besteht aus einer Straße, deren Y-Position durch einen niederfrequenten Sinusgenerator bestimmt wird, der in Frequenz und Amplitude einstellbar ist sowie einem Satz Räder, die selbst bereits als Federn wirken und schließlich dem eigentlichen Rahmen des Fahrzeuges, der über Federn und Dämpfer an den Radsatz gekoppelt ist. Anklicken des Bildes lädt ein ca. 8.5 MB großes Filmchen herunter, das einen Simulationslauf zeigt.
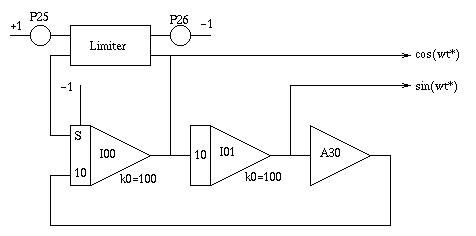
Ein Teil des mathematischen Hintergrundes dieser Simulation findet sich auf der Seite, welche die frühere Automobilfederungssimulation beschreibt sowie in größerem Detail im "Handbook of Analog Computation" (S. 91), das 1967 von EAI herausgegeben wurde. Im Folgenden werden nur die fertigen Teilrechenschaltungen mit den zugehörigen Potentiometereinstellungen gezeigt. Wie in fast jedem Fall, in welchem die graphische Darstellung eines bewegten Systems erforderlich ist, wird auch hier ein hochfrequentes sin-/cos-Signalpaar benötigt, das als Grundlage aller dargestellten Körper dient. Die Teilrechenschaltung hierfür ist unten dargestellt (Lösung der Differentialgleichung y''=-y). Bemerkenswert ist, dass hier keine positive Rückführung eingesetzt wird, um ein Abklingen des Ausgangssignales zu vermeiden. Dies liegt daran, dass die EAI-Integrierer dazu neigen, sich leicht aufzuschaukeln, was gerade ausreichend ist, um den gewünschten stabilisierenden Effekt zu erzielen, so dass nur ein Begrenzer notwendig wurde, um ein Aufschaukeln der Schaltung ebenfalls zu vermeiden. Die beiden Ausgangssignale der Schaltung werden im Folgenden mehrfach verwendet, um die einzelnen mechanischen Teilsysteme zu visualisieren.
Während die alte Automobilfederungssimulation einen niederfrequenten Rauschgenerator zur Anregung der Straße verwendete, entschloss ich mich, im Folgenden einen durchstimmbaren Sinusgenerator variabler Amplitude einzusetzen, um das Verhalten des mechanischen Systems genauer untersuchen zu können. Dieser Generator ähnelt stark der oben gezeigten Rechenschaltung, nur dass hier die beiden Integratoren über jeweils einen vorgeschalteten Parabelmultiplizierer verfügen, mit deren Hilfe die Frequenzeinstellung vorgenommen werden kann. Mit Hilfe von P00, einem manuell einstellbaren Potenetiometer, kann die Frequenz des Generators eingestellt werden, während P01 die Amplitude der Straßenanregung bestimmt.
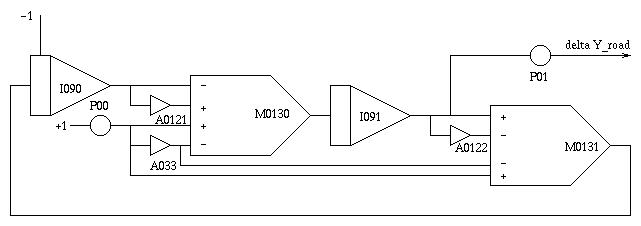
Mit Hilfe dieses Anregungssignales wird nun die restliche Simulationsschaltung gespeist. Die eigentliche Simulation des gekoppelten Zweimassenschwingers zeigt die untenstehende Rechenschaltung:
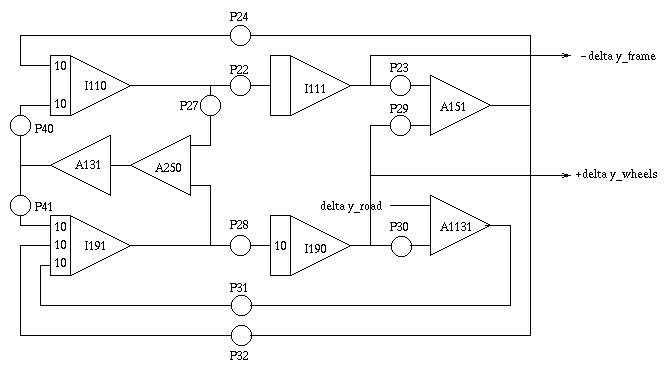
Nimmt man alles zusammen, steht nun sowohl ein hochfrequentes sin-/cos-Signalpaar als auch ein Y-Signal für die Anregung der Straße, der Räder sowie der Karosserie zur Verfügung. Die Y-Koordinaten der Fahrzeugkomponenten sowie der Straße können nun mit dem hochfrequenten Signalpaar überlagert werden, um eine stehende Darstellung auf einem Oszilloskop zu erzielen (der Fahrzeugkörper wurde mit Hilfe des Funktionsgenerators F2120 geformt):
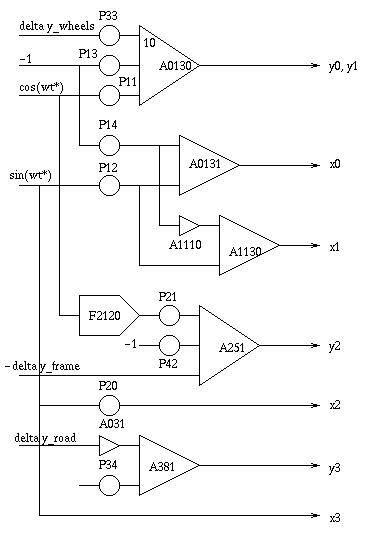
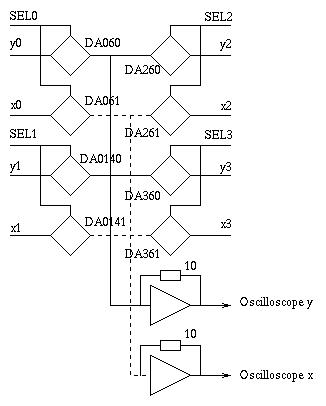
Insgeamt liegen nur vier Koordinatenpaar (y0, x0), ..., (y3, x3) vor, welche die Positionen der Räder, der Karosserie sowie der Straße beschreiben. Um diese Elemente nun zusammen auf einem Oszilloskop darstellen zu können, wird ein Multiplexer benötigt, der mit Hilfe einiger elektronischer Analogschalter der EAI 580 unter Ansteuerung durch ihren Digitalteil gebildet wird.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
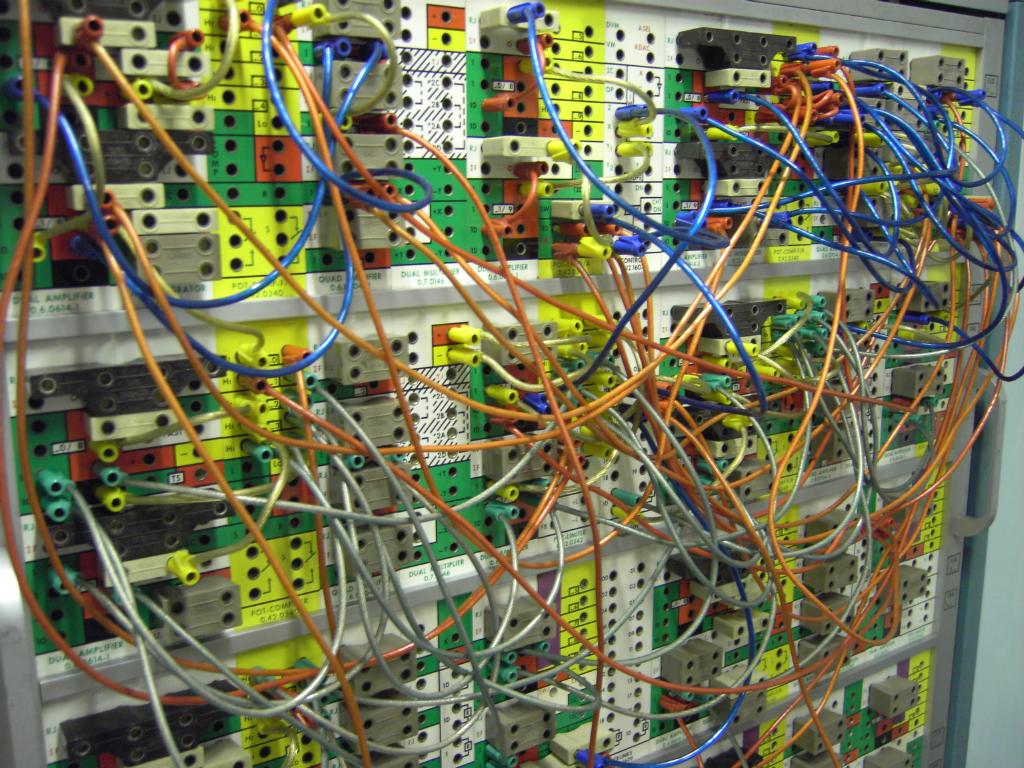
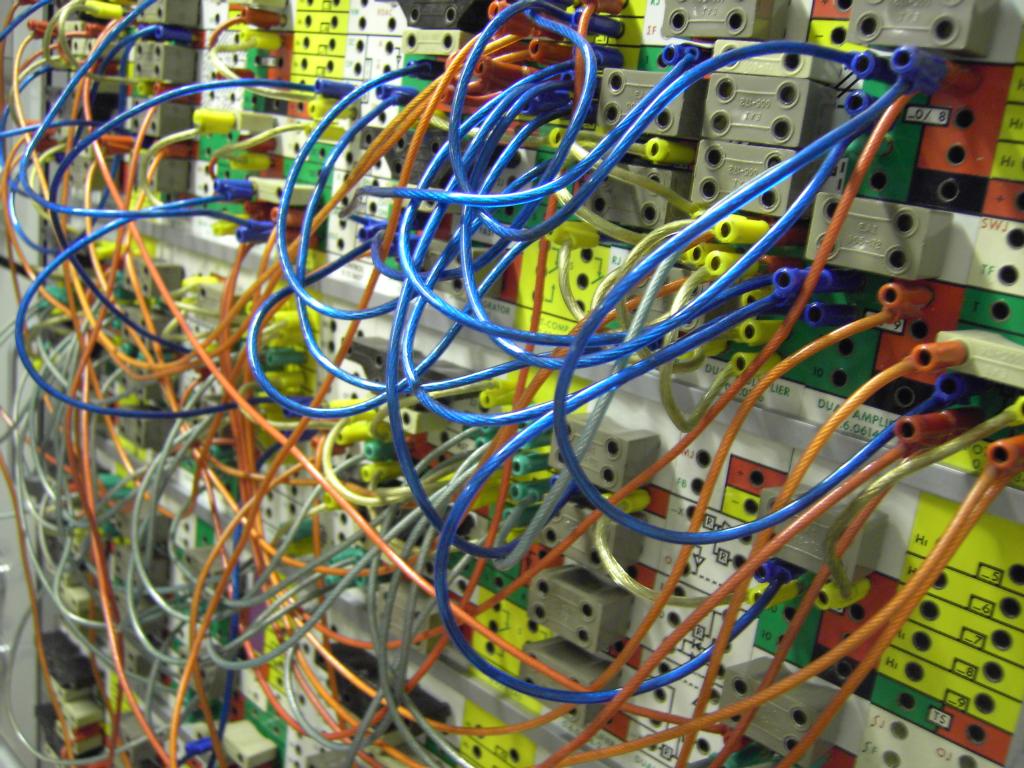
Die folgenden Bilder zeigen einige Impressionen des analogen Programmteiles. Wie man sieht, belegt das Problem nicht ganz die Hälfte der vorhandenen Rechenelemente der EAI 580. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
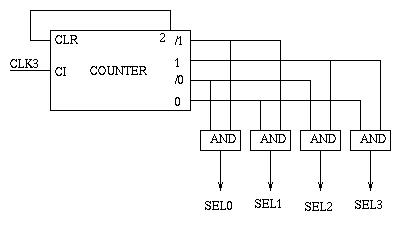
Nun muß noch die Ansteuerung der als Multiplexer geschalteten Analogschalter gelöst werden, die mit Hilfe der Steuersignale SEL0, SEL1, SEL2 und SEL3 geschieht. Dank des eingebauten Digitalteiles ist dies verhältnismäßig einfach - es wird lediglich ein Zweibitbinärzähler mit nachfolgendem Dekoder benötigt, um diese Steuersignale zu generieren. Die hierfür notwendige Rechenschaltung hat folgende Gestalt:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
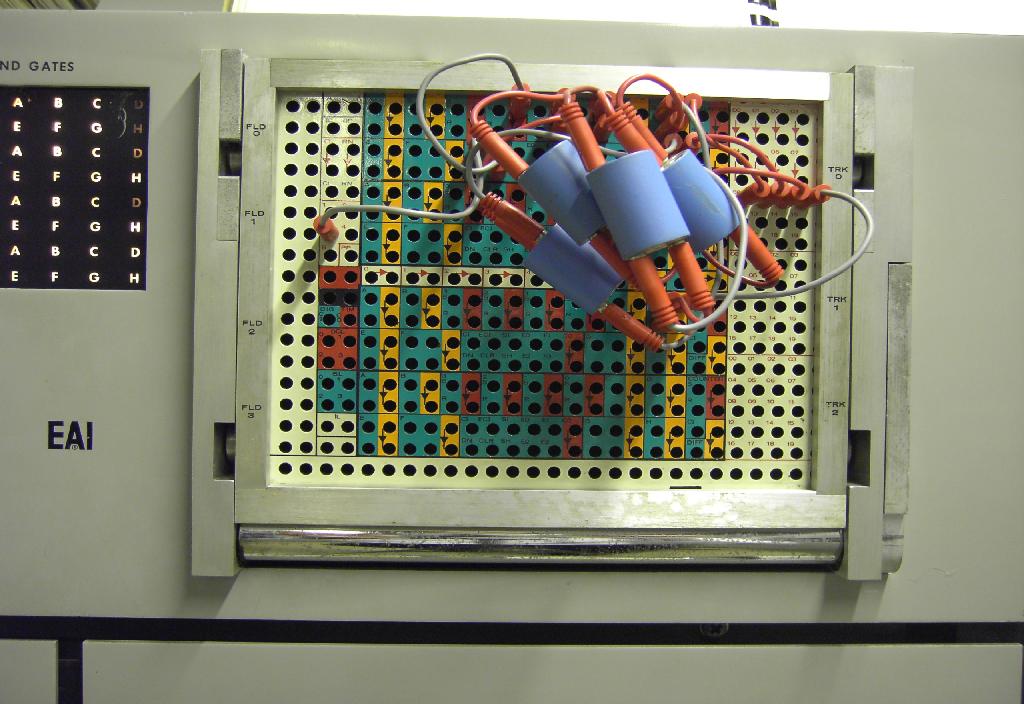
Das Bild zur Rechten zeigt die digitale Teilrechenschaltung - bedingt durch die geringe Größe des digitalen Steckfeldes der EAI 580 wirkt es komplexer als es ist (bei den blauen Elementen handelt es sich um freie Vielfache, d.h. Vielfachbuchsen, bestehend aus jeweils einem einfachen Aluminiumblock). |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Die gesamte Rechenschaltung benötigt 23 Koeffizientenpotentiometer, die wie folgt einzustellen sind:
Die Hauptkontrollparameter werden mit Hilfe der Potentiometer P24, P28, P31, P32, P40 und P41 eingestellt. Bedingt durch die optimierte Rechenschaltung hägen einige dieser Parameter stark voneinander ab, so dass ihre Einstellung etwas rechnerische Vorarbeit erforderlich macht. Der kleine Filmausschnitt wurde beispielsweise mit folgenden Einstellungen generiert:
Diese Parameter ziehen die folgenden Potentiometereinstellungen nach sich:
Diese Werte sind natürlich ausgesprochen unrealistisch - es ging mir in erster Linie darum, das Verhalten des Systems an einem etwas drastischen Beispiel zu demonstrieren. Dennoch ließe sich mit der oben gezeigten Rechenschaltung auch ein realistisches Fahrzeugmodell untersuchen. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
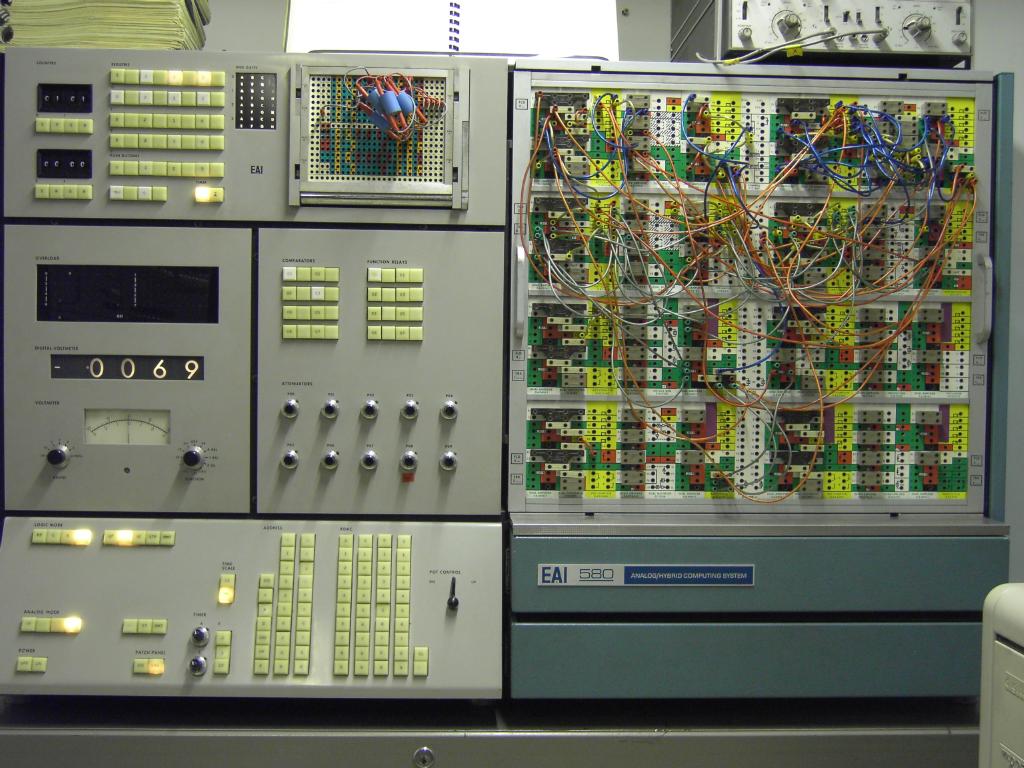
Das Bild zur Linken zeigt den Gesamtaufbau der Simulationsschaltung - auf der EAI 580 steht das zur Darstellung verwendete Oszilloskop. Bei Fragen zu dieser Seite oder allgemein zum analogen Rechnen erreichen Sie mich jederzeit per Mail (siehe unten). Frohes Analogrechnen! :-) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||