|

|
|
|
Mich haben seit jeher die Anfänge der (bemannten) Raumfahrt fasziniert, als die USA mit den Projekten Mercury und Gemini ihre ersten Schritte ins All unternahmen. Einer der faszinierendsten Punkte war für mich stets die Durchführung von Rendezvousmanövern zwischen zwei Raumschiffen im All (die Entwicklung der hierfür notwendigen Techniken war eines der Ziele des Gemini-Projektes). Wenn man über Astrodynamik nachdenkt (dabei fällt mir ein Buchtipp ein: "Introduction to Space Dynamics" von William Tyrell Thomson, erschienen bei Dover, das deutlich einfacher zu finden ist als das ebenfalls wunderbare Buch von Krafft-Ehricke), wird schnell klar, dass das Andocken zweier Raumschiffe ausgesprochen unintuitiv abläft und nicht wirklich einfach ist. Selbst unter der vereinfachenden Annahme zweier koplanarer und zirkularer Orbits, wie sie im Folgenden auch getroffen wird, führt die Tatsache, dass Orbits mit kleineren Radien höhere Winkelgeschwindigkeiten zur Folge haben als Orbits mit größeren Radien, zu einem recht verblüffenden Verhalten der Raumschiffe, das bei Dockingmanövern berücksichtigt werden muss. Aus diesem Grunde dachte ich dar¨ber nach, eine einfach Rendezvoussimulation zu implementieren, um ein Gefühl für die bei derartigen Manövern wirkende Astrodynamik zu bekommen, was in der Folge zu einem stark vereinfachten Ansatz führte, was einige starke Vereinfachungen nach sich zieht: Zum einen werden die Ausgangsorbits der beiden Raumschiffe als koplanar und zirkular angenommen, zum anderen wurde die Funktion zur Bestimmung der Winkelgeschwindigkeit in Abhängigkeit vom Radius des jeweiligen Orbits einfach als invers proportional zum Radius angenommen. |
|
|
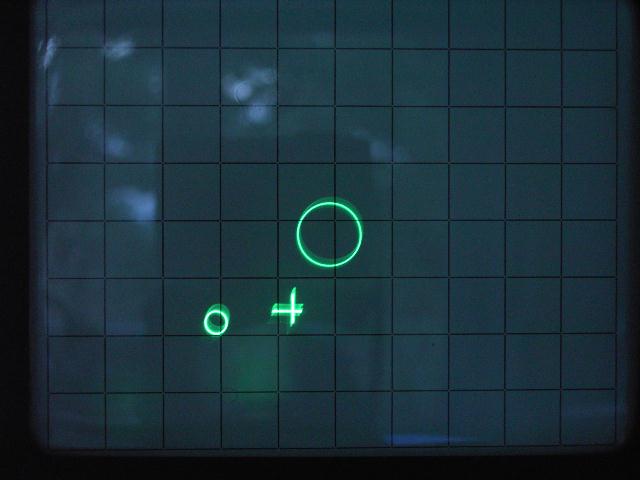
Das Bild auf der linken Seite zeigt ein Bildschirmphoto einer laufenden Simulation: In der Mitte befindet sich die Erde, während das diese umkreisende Ziel durch ein Kreuz symbolisiert wird. Das zu steuernde Raumschiff selbst wird duch einen kleinen Kreis repräsentiert (die Darstellung verwendet den Vierkanal-X/Y-Oszilloskopmultiplexer). |
|
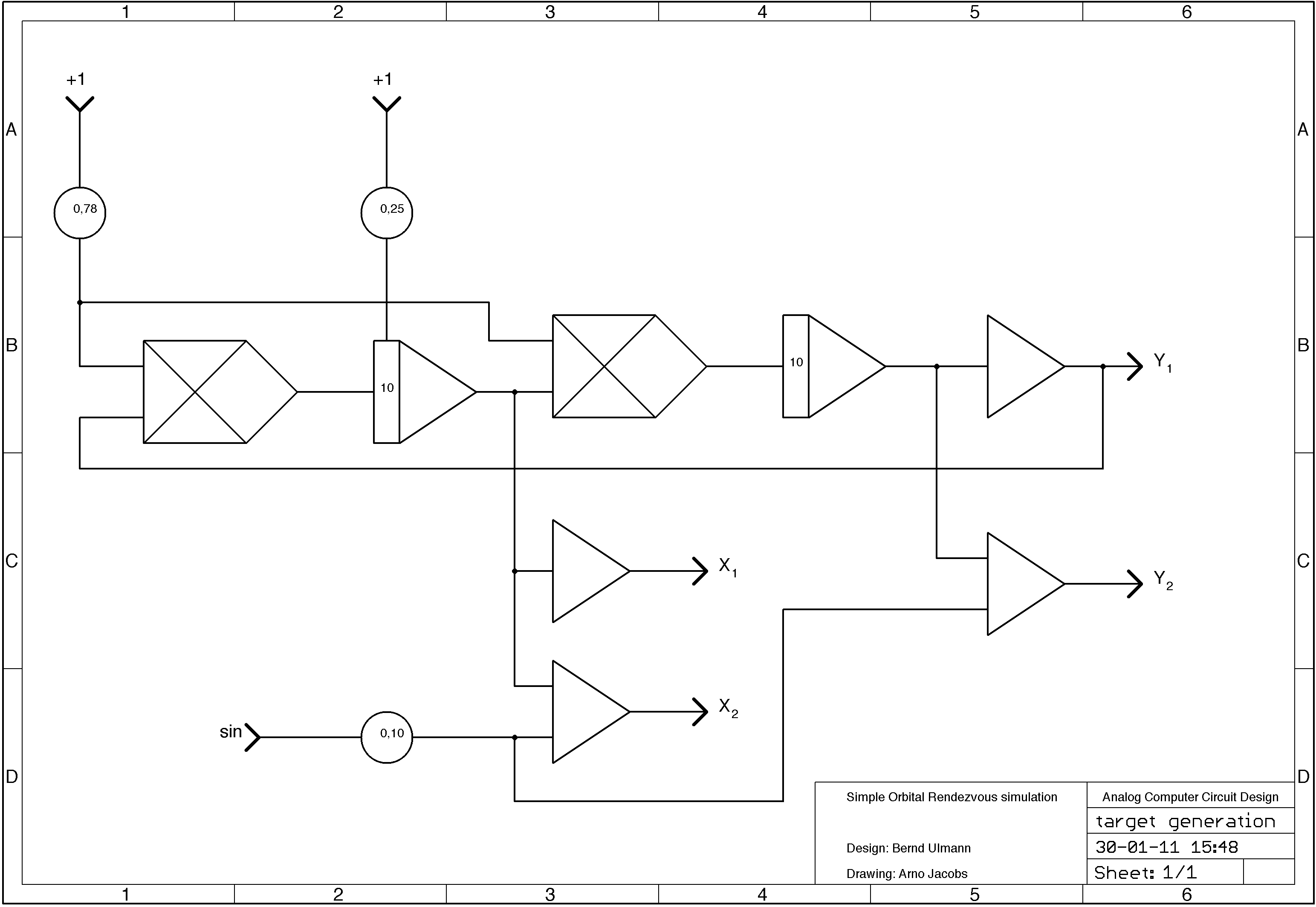
Zunächst wird also ein Zielobjekt benötigt, das die Erde auf einem einfachen zirkulären Orbit umkreist, was durch das rechts dargestellte Analogrechnerteilprogramm generiert wird, welches die Differentialgleichung y''=-y löst. Die Frequenz des solchermaßen erzeugten sin-/cos-Signalpaares wird mit Hilfe der beiden Multiplizierer eingestellt (Dank gebührt an dieser Stelle Arno Jacobs für die wunderschönen Rechenpläne). |
|
|
Um das Kreuz sowie die Erde und das eigene Raumschiff darzustellen, wird ein weiteres (hochfrequentes) sin-/cos-Signalpaar benötigt, welches mit einer sehr ähnlichen Schaltung generiert werden kann. In meiner Simulation kommt hier ein selbstgebauter Quadraturgenerator zum Einsatz, der dieses Problem allgemein löst, indem er ein sin-/cos-Signalpaar mit unterschiedlichen (festen) Frequenzen erzeugt und damit wertvolle Integrierer und Summierer für die eigentliche Rechenschaltung einzusparen hilft. Alle drei Objekte benötigen jeweils ein X-/Y-Kanalpaar des Vierkanal-X/Y-Oszilloskopmultiplexers. Die Berechnung der Koordinaten des eigenen Raumschiffes gestaltet sich etwas komplexer als die des Zielobjektes, da das Raumschiff den Radius seines Orbits verändern kann (dieser bleibt stets zirkulär und koplanar zum Zielorbit). |
|
|
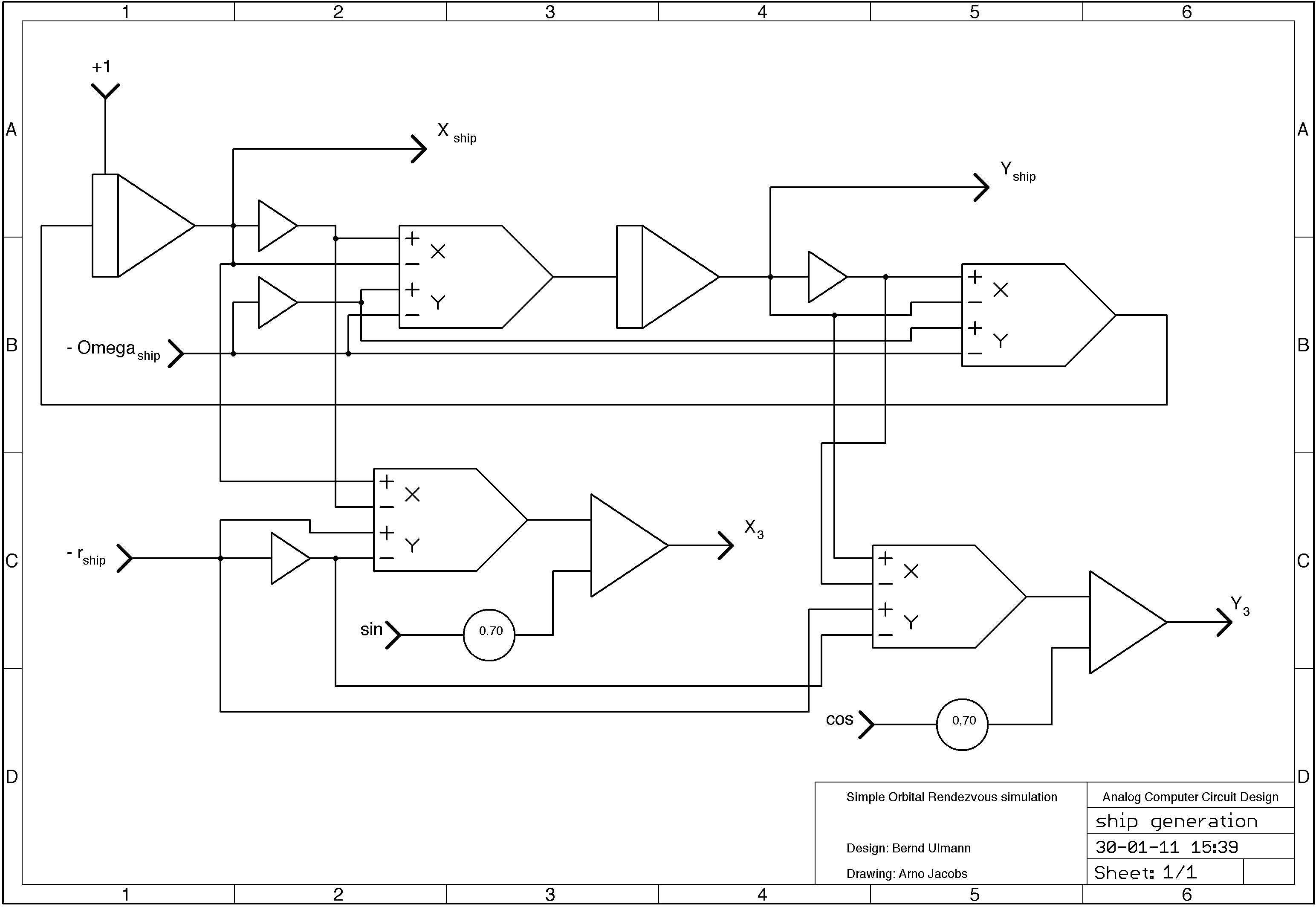
Die links dargestellte Teilrechenschaltung zeigt die Erzeugung der Raumschiffkoordinaten - die beidem Multiplizierer bilden mit den beiden Integrierern eine Schleife zur Erzeugung eines sin-/cos-Signalpaares mit variierender Frequenz (d.h. sich ändernder Winkelgeschwindigkeit), während die beiden unten dargestellten Multiplizierer den Radius des Orbits festlegen. |
|
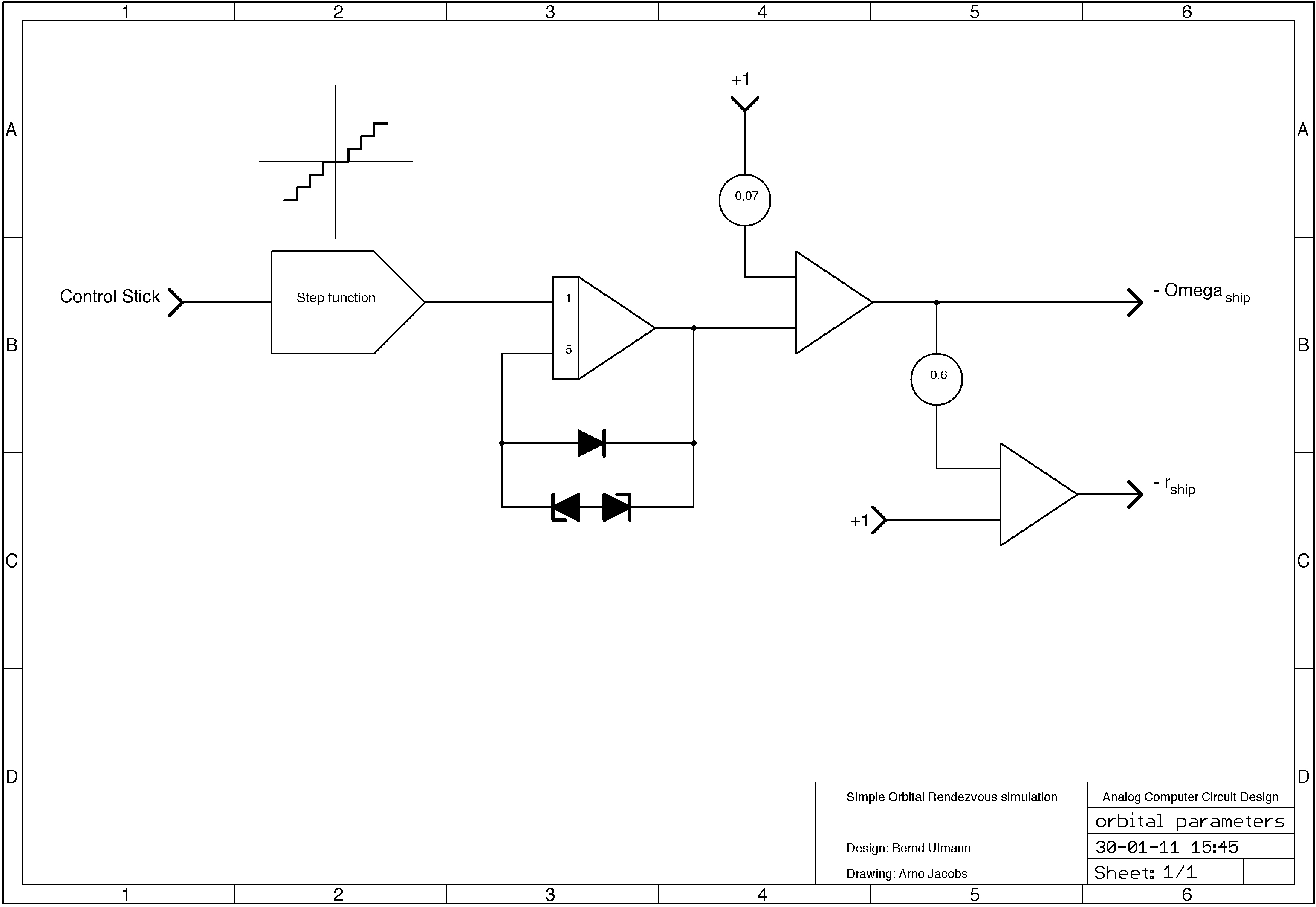
Was die Steuerung des Raumschiffes betrifft, wird angenommen, dass es über Steuerdüsen verfügt, deren Schub entweder strikt in Flugrichtung oder in entgesetzte Richtung wirkt. Diese Düsen werden durch einen selbstgebauten Joystick kontrolliert. Da derartige Steuerdüsen meist nicht über eine lineare Kennlinie verfügen, wird mit dem Ausgang des Joysticks zunächst ein Diodenfunktionsgenerator angesteuert, mit dessen Hilfe ein stufenartige Schubverhalten simuliert wird. |
|
|
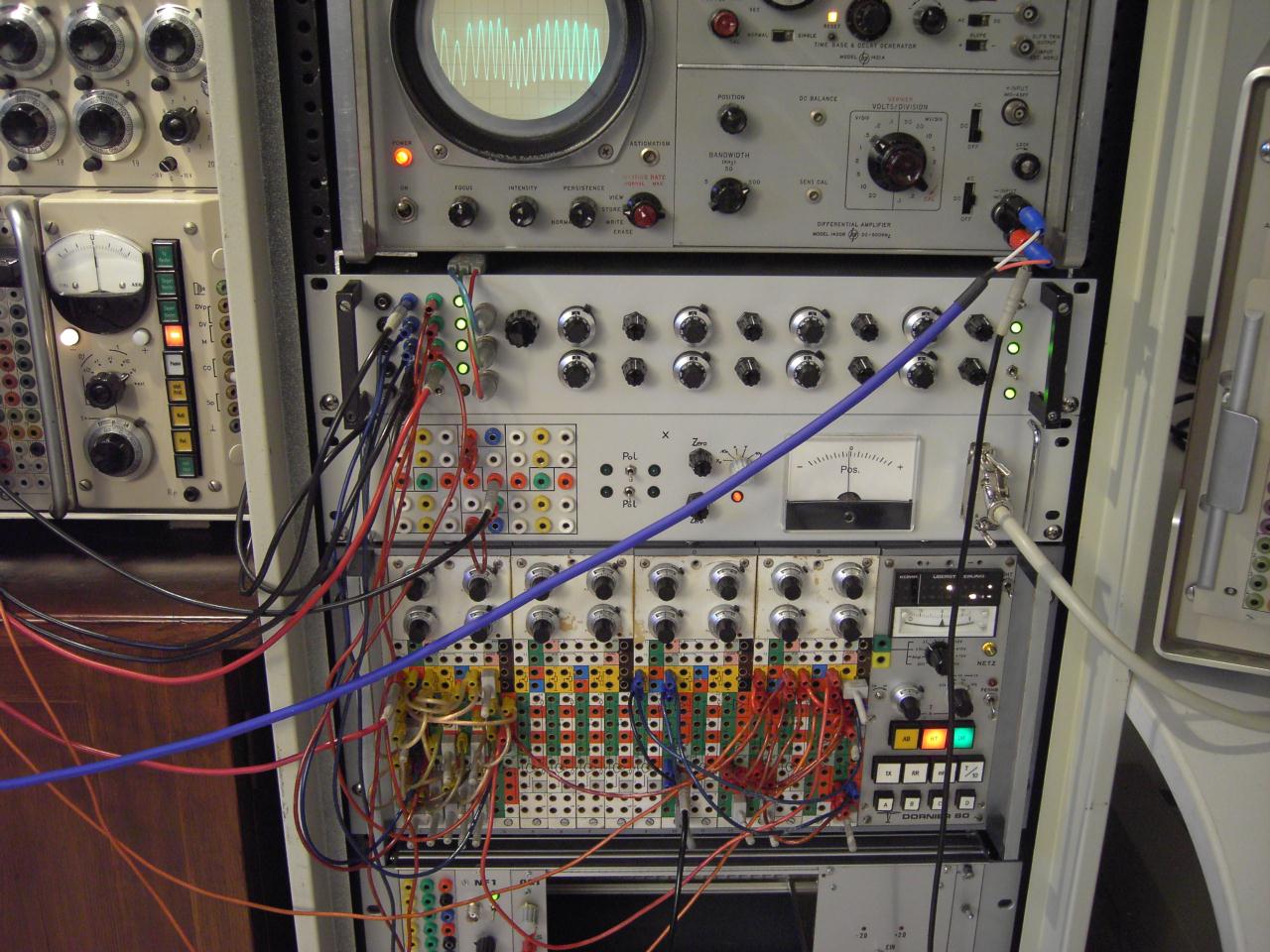
Die Abbildung links zeigt den Aufbau der Raumschiffgenerierung sowie der Berechnung der Winkelgeschwindigkeiten und des Orbitalradius in Abh&auuml;ngigkeit von der Tätigkeit der Steuerdüsen, die durch den "Piloten" gesteuert werden. Dieser Teil der Simulation belegt den größten Teil eines Telefunken RA 741 Tischanalogrechners. |
|
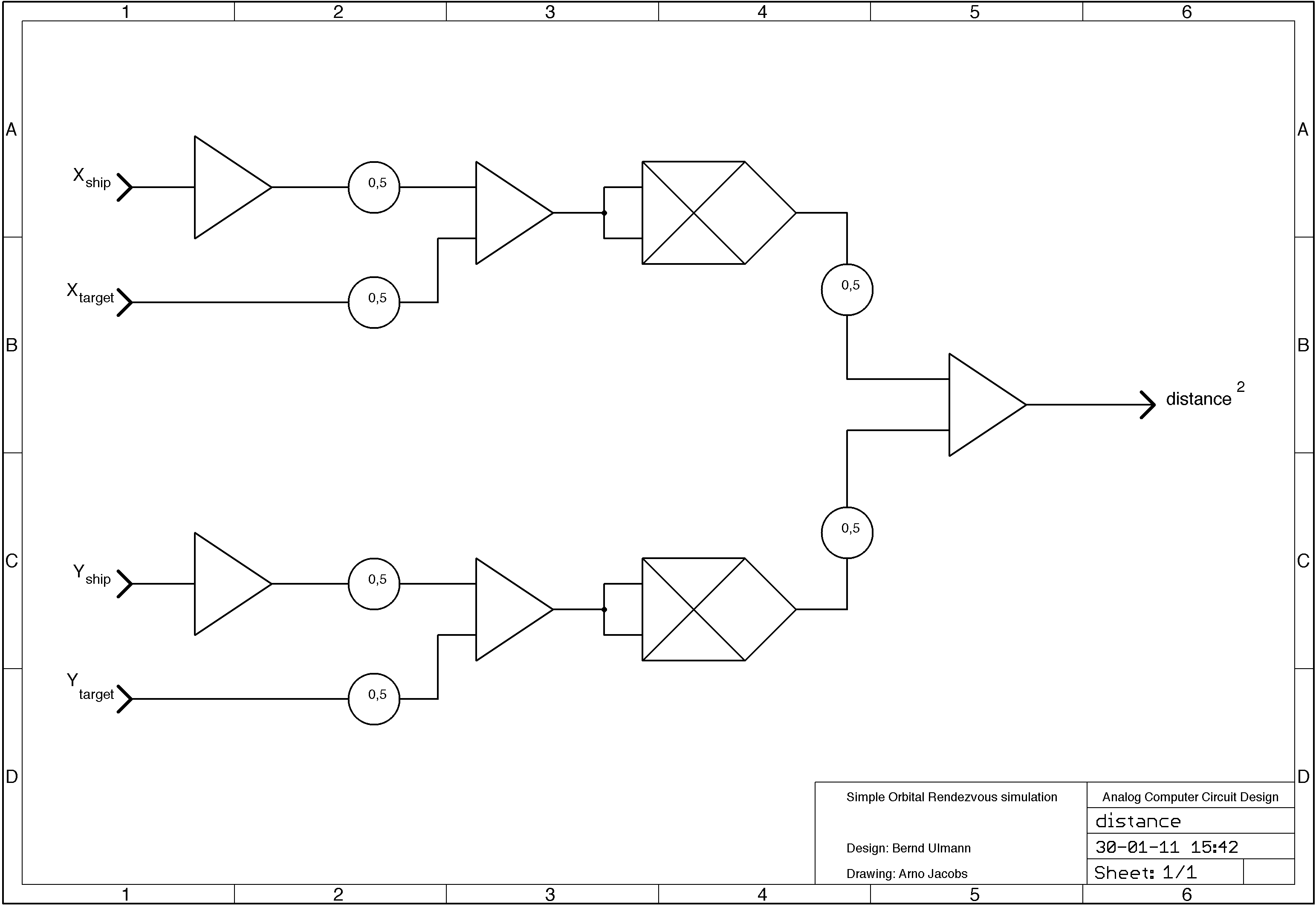
Wenn die kartesischen Koordinaten des Ziels sowie des Raumschiffes bekannt sind, ist es ein Leichtes, den Abstand zwischen beiden mit Hilfe der Euklidischen Norm zu berechnen (siehe Abbildung rechts). Der Ausgang dieser Teilrechenschaltung liefert leider das Abstandsquadrat, da ich keinen Multiplizierer mehr für den Aufbau einer Quadratwurzelschaltung frei hatte. |
|
|
Das Bild zur Linken zeigt den Aufbau der Zielgenerierung sowie der Abstandsberechnung. Oben im Rack ist ein Teil meines HP Speicheroszilloskops zu sehen. Darunter befinden sich der Vierkanal-X/Y-Oszilloskopmultiplexer sowie der Einschub für den Joystick. Darunter wiederum befindet sich ein kleiner Dornier DO-80 Analogrechner, der für diesen Teil der Simulation benötigt wird. |
|
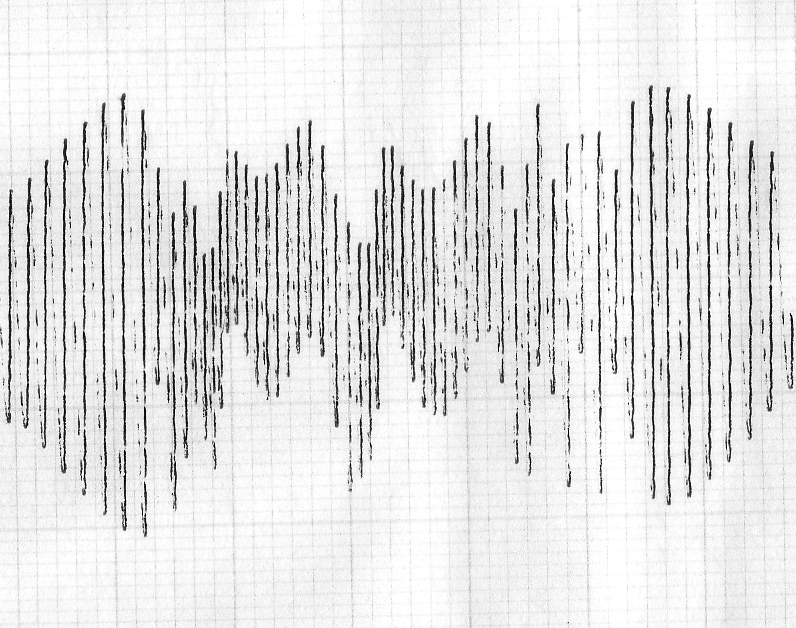
Die beiden untenstehenden Bilder zeigen Aufzeichnungen des Abstandes zwischen Raumschiff und Ziel (Abstandsquadrat) - das Bild links wurde mit Hilfe eines einfachen X/T-Schreibes aufgezeichnet, während das Bild rechts eine Bildschirmphotographie vom bereits genannten Speicheroszilloskop zeigt. |
|
|
|
|
Um einen Eindruck von der Simulation zu erhalten, die mit extrem unrealistischer Geschwindigkeit ablief, kann auf das rechts stehende Bild geklickt werden, hinter dem sich ein kleiner Videoclip (ca. 9 MB) befindet. Zu beachten ist, dass die Veränderung der Winkelgeschwindigkeit des Raumschiffes in Abhängigkeit von seinem Radius extrem unrealistisch ist, was aber der Tatsache keinen Abbruch tut, dass sich mit dieser Simulation ein Gefühl für die Eigenheiten der Astrodynamik erwerben lässt. |

|
|
13-JAN-2008, 21-DEC-2008, ulmann@analogmuseum.org |
|